
👋 Hi! I am Enyi Wang (王恩驿 in Chinese). I am currently an MRes (Master of Research) student at Imperial College London, affiliated with the Hamlyn Centre and I-X. I am supervised by Prof. Dandan Zhang at the Multi-Scale Embodied Intelligence Lab.
Before that, I received my B.Eng. degree from Fuzhou University (211 Project, China) in 2024, where I conducted research on continuum surgical robots supervised by Prof. Zhen Deng
🔬 Research Interests
Currently I am interested in robotic manipulation, tactile sensing, imitation learning, and vision-language-action (VLA) systems, aiming to advance robot learning through multi-modal perception and generalizable policy learning. My goal is to develop intelligent embodied agents that can perceive, reason, and act effectively like humans in the future.
📢 News
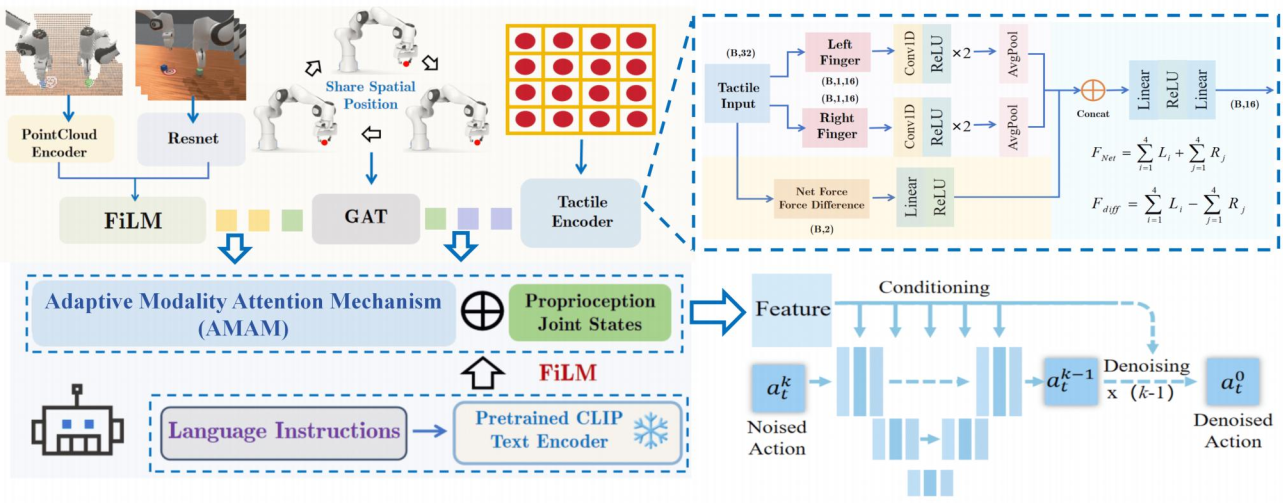
- 2026.02: 🎉🎉 Our paper “ADM-DP: Adaptive Dynamic Modality Diffusion Policy through Vision-Tactile-Graph Fusion for Multi-Agent Manipulation” was accepted to ICRA 2026!
- 2025.10: 🎉🎉 My MRes thesis “Multimodal Representation Learning for Multi-Robot Collaborative Manipulation” received Distinction at Imperial College London!
- 2025.06: 🎉🎉 Our Paper “Estimating Continuum Robot Shape under External Loading using Spatiotemporal Neural Networks” was accepted to IROS 2025 (from my final year project during undergraduate)
📝 Publications
Enyi Wang, Wen Fan, Dandan Zhang
[ICRA 2026]
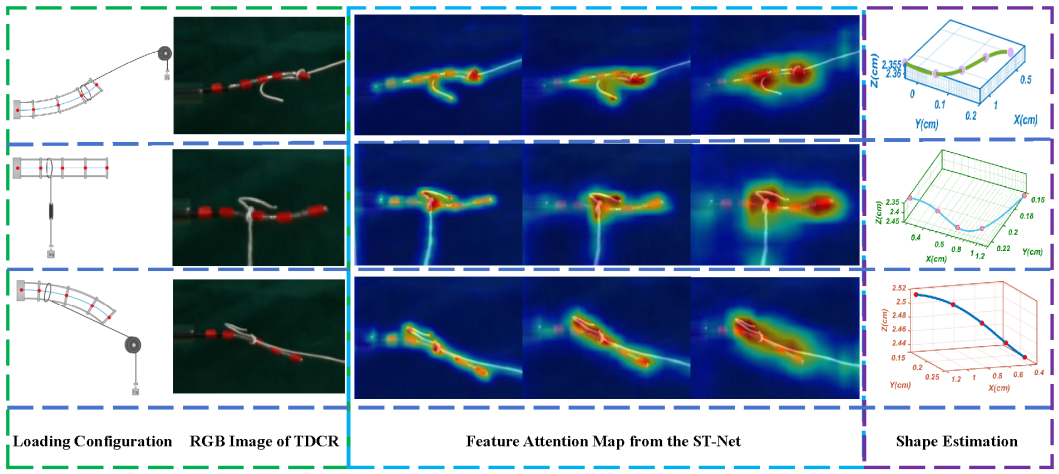
Estimating Continuum Robot Shape under External Loading using Spatiotemporal Neural Networks
Enyi Wang, Zhen Deng*, Chuanchuan Pan, Bingwei He, Jianwei Zhang
[IROS 2025]
🎖 Honors and Awards
- 2023.07 Excellent trainee, Summer Camp of the Chinese University of Hong Kong, Shenzhen
- 2022-2023 💰 Leader of a National-level Student Research Training Program (SRTP) team, funded with ¥20,000 RMB.
- 2022.09 - 2023.09 Deputy Lead of Choir, Chorus of Fuzhou University
- 2023.03 H Award, MCM/ICM
- 2022 & 2024 Comprehensive Award Scholarship, Fuzhou University
📖 Educations
💻 Internships
- 2023.03 - 2023.06, Shanghai Jiao Tong University × Drivedream Technology (industry–academia collaboration), Shanghai, China.
Collaborated to develop an industrial six-axis robotic-arm milling (CNC) system.